苏州数控车床自动上下料方案设计
无锡法思特AI视觉云平台利用深度学习算法框架结合自主研发的电子元器件检测模型成功实现了字符识别、目标定位、缺陷检测及分类的云端化,用户只需通过在线标注、训练的方式进行自定义学习。成功实现了复杂场景下的识别检测,同时具有抗干扰能力强、准确率高、算法自升级等优势,识别率可达。AI机器视觉低代码开发平台--0代码,0硬件,0成本,点击试用北京矩视智能科技有限公司是一家工业AI视觉云平台提供商,致力于将人工智能应用于工业视觉领域,在线提供字符识别、缺陷检测、目标定位等功能,可覆盖上千种工业细分场景,工业视觉领域的通用人工智能。创始团队来自国内外大学,已落地近百个工业视觉场景,获融资近千万元。 无锡法思特机器人专业从事数控铣床自动上下料设计,生产,调试,售后为一体,服务于工业机器人集成应用。苏州数控车床自动上下料方案设计
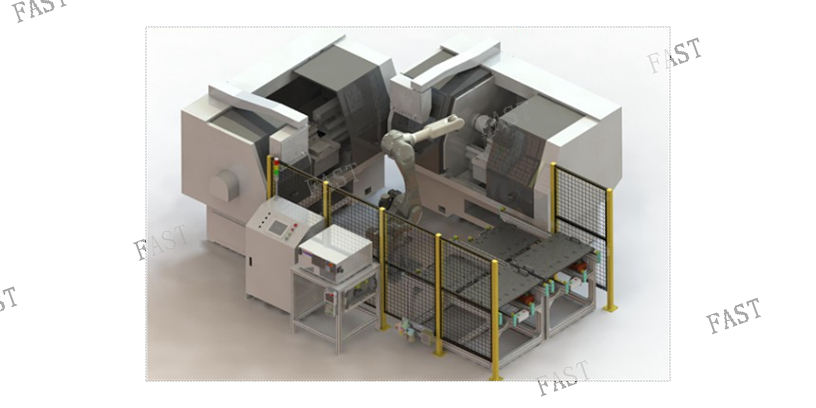
桁架机器人是数控机床自动化的组成部分采用桁架机器人输送先进的一面是,机床柔性加工自动线整体的自动化、智能化的协调统一。目前,汽车制造业中加工发动机缸体、缸盖及曲轴等大批量关键零件的柔性加工自动线,大都采用了桁架机器人输送。桁架机器人和数控机床紧密配合,组成无人上下料机加工系统,能够提高工作效率,降低用工成本。桁架机器人由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。桁架机器人应用于数控车床、加工中心、磨床、插齿机、清洁机等设备进行加工自动化上下料。它的的优势在抓取产品的稳定性好和重复定位精度高、噪音低等特点。基本部件都采用好的配置,设备运行稳定。桁架机器人由主体、驱动系统和控制系统三个基本部分组成。按机器人结构分类为直角坐标型,机器人沿二维直角坐标系移动。主体部分通常采用龙门式结构,由y向横梁与导轨、z向滑枕、十字滑座、立柱、过渡连接板和基座等部分组成,z向的直线运动皆为交流伺服电动机通过蜗轮减速器驱动齿轮与y向横梁、z向滑枕上固定的齿条作滚动,驱动移动部件沿导轨快速运动。移动部件为质量较轻的十字滑座和z向滑枕,滑枕采用由铝合金拉制的型材。横梁采用方钢型材。南京数控车床自动上下料维修无锡法思特机器人专业从事工业机器人上下料工作站设计!
随着信息技术的高速发展,电子元器件在我国需求量逐渐增大,而且电子元器件也逐渐向薄型化、智能化、集成化、微型化的趋势发展,但这也成为了电子元器件检测的阻碍,极大的限制了企业的批量生产效率和产品质量的提升。因此需要AI视觉通过无接触、无损伤的实时检测方法代替人工、传统方式检测,从而提升企业的生产率及产品质量。电子元器件识别检测:电子元器件生产过程中需要经过复杂的工艺处理,在多重工序处理下,会出现各种问题,如表面缺陷、字符不清等。因为电子元器件种类繁多,各类电子元器件的结构形状、损坏程度和检验方法也均不相同,一些传统检测方法已无法适应高节拍、柔性化的生产需求。1、贴片元器件在生产过程中易出现孔洞、剥落、污点等缺陷,由于缺陷小,传统算法需要耗费大量的时间对缺陷进行定制化开发,并且在进行灰度阈值分割时,易将微小的缺陷分割出去,很难保证在高速生产线上实现零缺陷检测的要求;2、PCB板上存在很多焊点和细小零件,字符识别采集图像时背景较为复杂,干扰因素多,造成字符定位和识别不准确,加上零件本身反光,会出现识别信息不全、误识别以及识别速度慢等情况,无法满足实际生产检测过程中对PCB板字符识别的需求。
汽车装配车间是劳动密集型车间,在人力资源日趋紧张的情况下,运用机器人集成机器视觉可以有效实现工件特征复杂、来料状态没有精确定位的装配件的自动装配。协作机器人与周边作业人员有很好的交互环境,相对于传统机器人更适用于劳动密集型的总装车间。协作机器人轻巧紧凑、节省空间、易于重新部署在多个应用站位中,不会改变产线的生产布局,无需安全围栏隔离也能运行,可与产线员工实现共同协作。1外饰条装配作业要求本文以劳动强度大的汽车侧围外饰条压紧工序为研究对象,外饰条需在16℃以上温度、()以上压力下才能达到90%的胶粘浸润率,如图1所示。由于操作员工无法长时间施加()的压力,易于疲劳作业,无法保证装配质量,本工序采用协作机器人自动作业,以改善生产线人机状态和操作环境,提升员工工作舒适性和满意度。 苏州非标自动上下料设计哪家专业,请选择无锡法思特机器人自动化有限公司。
零件和产品的在线尺寸测量可以减少检查时间。图像处理系统使检查速度更快,并有助于提高生产率。存储和管理质量信息基于夹具的尺寸检查无法提供准确的测量数据。它检查尺寸是否在公差范围内。使用图像处理的尺寸检查提供通过/不通过判断结果,而且还提供多个部分的准确尺寸的数值数据,并且可以轻松地保存和管理这些数据。这样的信息也可以有效地用于可追溯性管理或流程改进。实际应用随着工厂自动化程度的提高,节省检查时间已成为一个挑战,尺寸测量也是如此。使用图像处理进行测量已成为此类过程改进的主要技术。检查各种尺寸的贴片电容器除了电容器主体的直径和长度之外,还可以将其部分划分为多个部分以执行边缘位置检测,并获得变窄部分的小直径或导线的长度或弯曲度。每个零件的尺寸都可以精确测量。瓶口的尺寸测量即使在线使用,尺寸也可以准确测量。例如,您可以捕获从侧面在线上移动的PET瓶的图像,并测量瓶颈环的尺寸,以检测成型不良,类型错误或组装失败。这种在线尺寸检查可以提高效率。 无锡非标自动上下料设备哪家好,请选择无锡法思特机器人自动化有限公司。苏州数控车床自动上下料方案设计
无锡法思特机器人专业从事工业机器人蜗壳打磨工作站设计!苏州数控车床自动上下料方案设计
我国工业机器人起步于70年代初,其发展过程大致可分为三个阶段:70年代的萌芽期;80年代的开发期;90年代的实用化期。而今经过20多年的发展已经初具规模。当前国内某些关键技术已达到或接近世界水平,一批国产工业机器人已服务于国内诸多企业的生产线上。一个国家要引入高技术并将其转移为产业技术(产业化),必须具备5个要5M。和有着“机器人王国”之称的日本相比,我国人口众多,劳动力过剩。刺激日本发展工业机器人的根本动力就在于要解决劳动力严重短缺的问题。所以,我国工业机器人起步晚发展缓。但是正如前所述,使用机器人是实现工业自动化,提高社会生产效率的一种十分重要的途径。我国正在努力发展工业机器人产业,引进国外技术和设备,培养人才,打开市场。日本工业机器人产业的辉煌得益于本国的鼓励政策,我国在十一五纲要中也体现出了对发展工业机器人的大力支持。当前,国外已经研制和生产了各种不同的标准组件,而中国作为未来工业机器人的主要生产国,标准化的过程是发展趋势。中国制造业面临着向转变,承接国际先进制造、参与国际分工的巨大挑战。 苏州数控车床自动上下料方案设计
上一篇: 苏州油压机自动上下料哪里买
下一篇: 苏州专机自动上下料培训