嘉定区激光位移传感器技术指导
激光位移传感器的测量精度容易受到被测物体表面特征的影响,为了减小测量误差,在整形镜设计中应尽量使出射光斑在有效的测量范围内实现光斑小且均匀。针对传感头小型化设计的要求,半导体激光器体积小、重量轻的优点正好符合这一要求,但其光束质量并不理想,需要对其进行光束整形。半导体激光器快慢轴的光束分布极不对称:快轴发散角较大,半角的典型值为30~40°,光束呈高斯分布,发光范围的半宽度为0.6~0.8μm,慢轴发散角的半角典型值为3~6°,光束分布不规则,发光范围半宽度为50~100μm。因此,在不允许能量损失的情况下,要求整形系统的物方数值孔径(NA)>0.573;但由于光束的快轴能量呈高斯分布,通常取半宽度(FWHM)为20°,此时NA=0.342。系统物距应尽量小一些,但考虑到工艺问题,不宜过小,选定为2.5mm。为了便于设计,将系统倒置,整个系统的主要要求为:工作波长为785±10nm,像方NA=0.342,像距l′=2.5mm,物距l=40~60mm,焦距f=3~4mm。激光位移传感器在学术科研行业的应用案例。嘉定区激光位移传感器技术指导
从图2的镜头图可以看出,第二块透镜的半径很小,主要是为了保证系统在整个工作范围内得到相对均匀的光斑。表1给出了在工作范围内光斑的直径大小,maximum为0.4mm,在靠近透镜的一边,minimun为0.08mm,在55mm处。由于成像系统的入射光是整形部分光经过物体散射回去的,因此整形系统得到的光斑不能太小;同时为了保证精度要求,光斑也不能太大,上面的结果能够满足需求。得到好的出射光斑以后,如何接收物体表面的散射光并使其精确成像,是确保激光位移传感器精度的关键问题。在直入射式三角法测量中,物体沿激光入射方向移动,物面并不垂直于成像光轴。那么在透镜成像过程中(如图1),由几何成像公式可证明: tanα/tanβ=d1/d',即为理想成像的Scheimpflug条件[5]。要想达到理想的成像效果,光电探测器需依此条件放置。芜湖激光位移传感器供应链它具有高度稳定性和可靠性。

与通常在室内使用的工业检测或实验研究检测激光位移传感器不同的是,用于道路检测的激光位移传感器要面临使用条件变化多、使用环境更苛刻且无固定规律可循等诸多问题。公知的路面按铺设材料分为沥青路面和水泥路面。对于水泥路面,一般来讲路表面的反射强度比较均匀,但也存在特殊的局部镜面和高反射率的材料;另外,水泥路面还存在经过特殊处理的人工刻制沟槽(通常称为路面构造深度),这些人工刻制的沟槽可用于提高路面抗滑性能。以上这些情况在采用工业检测或实验研究检测激光位移传感器检测路面指标,特别是检测路面构造深度时,就必须采取必要的措施以减小或消除各种不利因素造成的影响。对于沥青路面,情况就更为复杂,除了路面存在泛油、各种污染物(如油物等)和路面修补等情况外,沥青道路表面的级配设计变化使路面的颗粒大小不一、路面使用材料的不同、结构上的构造深度、路面上的标志线以及路面长期使用后路面的磨光等都对激光位移传感器的检测精度产生影响。
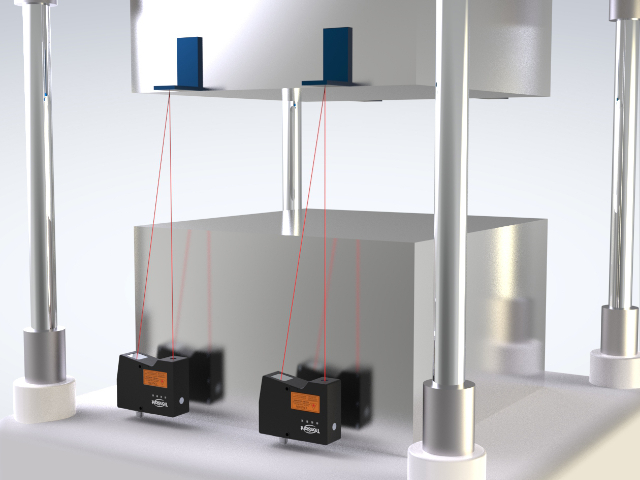
本实用新型要解决的技术问题,在于提供一种激光位移传感器检验校准装置,通过该装置来提高检验的精度,减小设备尺寸节约空间。本实用新型是这样实现的:一种激光位移传感器检验校准装置,包括一可伸缩导轨、一微调装置、一传感器夹持装置、一激光位移传感器以及一激光红外线接收挡板;所述微调装置和传感器夹持装置设于所述可伸缩导轨的上端;所述激光位移传感器夹持在所述传感器夹持装置上,且使所述激光位移传感器的激光发射端朝向所述微调装置;所述激光红外线接收挡板与所述微调装置固接,且使所述激光红外线接收挡板的接收面朝向所述传感器夹持装置。高精度激光位移传感器还可以用于科学研究和实验室应用。
如权利要求4所述的激光位移传感器检验校准装置,其特征在于:所述电子测量仪包括一电子千分表以及一千分表夹持装置;所述电子千分表夹持在所述千分表夹持装置上,所述千分表夹持装置一端抵接于所述延伸部,另一端抵接于所述横向蜗杆上。如权利要求1所述的激光位移传感器检验校准装置,其特征在于:所述传感器夹持装置包括一纵向螺杆以及一夹持器;所述夹持器套设在所述纵向螺杆上,所述激光位移传感器夹持在所述夹持器上。aaaaaaaaa这种传感器还可以用于测量建筑物的结构变形,以确保其安全性。好的激光位移传感器成本价
它可以用于测量机械零件的位移,以确保其精确性和稳定性。嘉定区激光位移传感器技术指导
所述可伸缩导轨1包括一电动伸缩双直线导轨11、一No.1支撑件15、一第二支撑件16、一滑动轮12、一伸缩制动开关13以及一控制面板14;所述电动伸缩双直线导轨11包括一伺服电机(未图示)、一双直线导轨111以及一丝杆(未图示),所述丝杆设于所述双直线导轨111内部,所述丝杆与所述双直线导轨111动联接,所述伺服电机设于所述双直线导轨111的末端且与所述丝杆连接,所述伺服电机通过所述丝杆联动所述双直线导轨111进行伸缩;所述No.1支撑件15安装在所述电动伸缩双直线导轨11固定端的底部,所述第二支撑件16安装在所述电动伸缩双直线导轨11可伸缩端的底部;所述滑动轮12设于所述第二支撑件16的底部,所述电动伸缩双直线导轨11可通过所述滑动轮12进行伸缩;所述伸缩制动开关13设于所述第二支撑件16的侧面,用于伸缩制动的开启与关闭;所述控制面板14与所述电动伸缩双直线导轨11电连接,所述控制面板14用于控制所述电动伸缩双直线导轨11的伸缩距离。嘉定区激光位移传感器技术指导
上一篇: 长宁区激光位移传感器行情
下一篇: 山东激光位移传感器诚信企业推荐